Dynamically isotropic Gough-Stewart platform for micro-vibration isolation in spacecraft
Abstract:
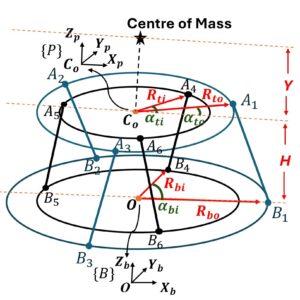
Rotating components such as reaction wheels and momentum wheels on spacecraft generate micro-vibrations up to 250 Hz during on-orbit operations. While the use of Gough-Stewart Platforms (GSPs) for six degrees of freedom (DOF) vibration isolation has been proposed, a conventional GSP lacks dynamic isotropy, hindering effective vibration attenuation. A dynamically isotropic mechanism, characterized by equal or nearly equal first six natural frequencies is useful for effective vibration isolation, as it enables the attenuation of the first six modes of vibration effectively from a sensitive payload. Consequently, a dynamically isotropic Modified Gough-Stewart Platform (MGSP) where the first six natural frequencies are equal has been investigated in this work to redress this limitation in conventional GSPs.
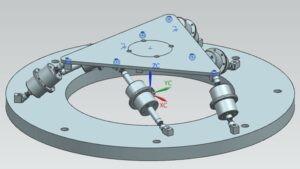
This work deals with the design of an MGSP for dynamic isotropy. The analytical expressions for the design variables in their explicit form are derived from a geometry-based approach, which in turn results from the properties of two triangles facilitating straightforward design. The approach accommodates various payload configurations, including variable center of mass and mass/inertia properties. Validation through finite element software ANSYS ensures similar natural frequencies across six modes, crucial for effective isolation. Practical viability is enhanced by incorporating flexural joints and structural damping in the design. A prototype of the MGSP featuring flexural joints was tested for a 10 kg dummy payload at the Indian Space Research Organization (ISRO) vibration test facility, and it yielded experimental outcomes in close agreement with the finite element analysis results — the first six natural frequencies were close to the expected 29 Hz and vibration isolation of about 22 dB/octave. The close agreement among analytical, finite element, and experimental outcomes underscores the efficacy of our design approach and the suitability of an MGSP for micro-vibration isolation applications in spacecraft.
Our study extended the geometry-based approach to include the design of dynamically isotropic MGSPs with more than six legs. In practical scenarios, the preference for a higher leg count (>6) stems from the need to distribute heavy loads across multiple actuators or to enhance fault tolerance capabilities. This can facilitate an economical approach to modifying previously developed dynamically isotropic 6-6 MGSPs into dynamically isotropic configurations with more than six legs with enhanced payload capacity.


References for my PhD work
Journal Publication:
- Y. P. Singh, N. Ahmad, and A. Ghosal, “Dynamically isotropic Gough-Stewart platform for micro-vibration isolation in spacecrafts,” Mechanism and Machine Theory, vol. 201, Elsevier, July 2024.
- Y. P. Singh, N. Ahmad, and A. Ghosal, “Design of Decoupled and Dynamically Isotropic Parallel Manipulators Considering Five Degrees-of-Freedom,” ASME Journal of Mechanisms and Robotics, vol. 16, no. 1. ASME International, April 2023.
Conference Publication:
- Y. P. Singh and A. Ghosal, “Dynamically Isotropic Gough-Stewart Platform Design Using a Pair of Triangles,” In: Advances in Service and Industrial Robotics. RAAD 2023, Bled, Slovenia. Mechanisms and Machine Science, vol. 135, Springer Nature Switzerland, pp. 264–272, June 2023.
- Y. P. Singh, N. Ahmad, and A. Ghosal, “Dynamically isotropic Gough-Stewart Platform design with flexural joints,” In: Kumar, R.S., Sanyal, S., Pathak, P.M. (eds) Recent Advances in Machines, Mechanisms, Materials and Design, 6th International and 21st National Conference on Machines and Mechanisms, Raipur, India, Oct. 2024, Springer Nature.
- Y. P. Singh and A. Ghosal, “Design of Decoupled and Dynamically Isotropic Parallel Manipulators With Five Degrees of Freedom,” In: ASME 2022 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. Vol. 7: 46th Mechanisms and Robotics Conference (MR), St. Louis, Missouri, USA. August 14–17, 2022.
- Y. P. Singh, N. Ahmad, and A. Ghosal, “Design of dynamically isotropic two radii Gough-Stewart platforms with arbitrary number of struts” In: 9th RSI International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, IEEE XPLORE 2022, pp. 66-71.
- Y. P. Singh, N. Ahmad, and A. Ghosal, “Design of Dynamically Isotropic Modified Gough- Stewart Platform Using a Geometry-Based Approach,” In: Advances in Asian Mechanism and Machine Science. ASIAN MMS 2021, Hanoi, Vietnam. Mechanisms and Machine Science, vol. 113, Springer International Publishing, pp. 258–268, Dec., 2021.